
![]() Håkan Almqvist, Martin Magnusson, Tomasz Piotr Kucner, and Achim J. Lilienthal
Håkan Almqvist, Martin Magnusson, Tomasz Piotr Kucner, and Achim J. Lilienthal
Learning to detect misaligned point clouds
Journal of Field Robotics (Volume: 35, Issue: 5; first published online 4 December 2017)
DOI: 10.1002/rob.21768
Abstract
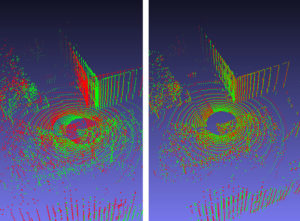
Matching and merging overlapping point clouds is a common procedure in many applications, including mobile robotics, three-dimensional mapping, and object visualization. However, fully automatic point-cloud matching, without manual verification, is still not possible because no matching algorithms exist today that can provide any certain methods for detecting misaligned point clouds. In this article, we make a comparative evaluation of geometric consistency methods for classifying aligned and nonaligned point-cloud pairs. We also propose a method that combines the results of the evaluated methods to further improve the classification of the point clouds. We compare a range of methods on two data sets from different environments related to mobile robotics and mapping. The results show that methods based on a Normal Distributions Transform representation of the point clouds perform best under the circumstances presented herein.
@article{almqvist_misaligned,
author = {Almqvist, Håkan and Magnusson, Martin and Kucner, Tomasz P. and Lilienthal, Achim J.},
title = {Learning to detect misaligned point clouds},
journal = {Journal of Field Robotics},
volume = {35},
number = {5},
year = 2018,
pages = {662--677},
doi = {10.1002/rob.21768},
}