
![]() Mazin Hamad, Nico Mansfeld, Saeed Abdolshah and Sami Haddadin
Mazin Hamad, Nico Mansfeld, Saeed Abdolshah and Sami Haddadin
The Role of Robot Payload in the Safety Map Framework
Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS) 2019
Abstract
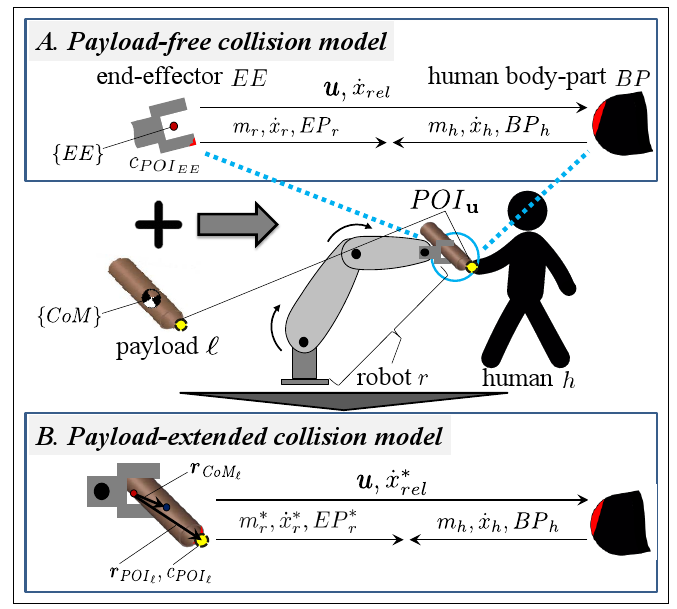
In practical robotic applications various types of tools are attached for manipulating objects. Besides adding gravitational load to the robot, which results in larger joint torques, such payloads influence the collision safety characteristics through changing surface curvature properties, reflected mass and effective robot speed along a desired motion direction. In this paper, we evaluate the effect a known, unactuated payload that is attached to the end-effector has on the intantaneous reflected inertial parameters and maximum task velocity of a robot. The proposed mass update approach relies on the analysis of the kinetic energy matrices, while the velocity maximization is tackled by formulating static optimization problems with different constraints on angular motion of the end-effector. Finally, for analyzing the validity of the introduced approach in the framework of Safety Maps, we discuss simulation results of a PUMA 560 robot that has an exemplary payload attached to its end-effector.
@inproceedings{hamad-2019-payload,
author = {Mazin Hamad and Nico Mansfeld and Saeed Abdolshah and Sami Haddadin},
title = {The Role of Robot Payload in the Safety Map Framework},
booktitle = {Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS) 2019},
year = {2019},
month = nov,
}