
![]() Federico Massa, Luca Bonamini, Alessandro Settimi, Lucia Pallottino and Danilo Caporale
Federico Massa, Luca Bonamini, Alessandro Settimi, Lucia Pallottino and Danilo Caporale
LiDAR-Based GNSS Denied Localization for Autonomous Racing Cars
Sensors 2020, 20(14), 3992
Abstract
Self driving vehicles promise to bring one of the greatest technological and social revolutions
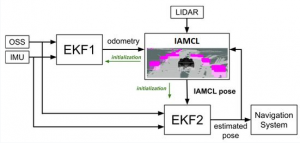
of the next decade for their potential to drastically change human mobility and goods transportation, in particular regarding efficiency and safety. Autonomous racing provides very similar technological issues while allowing for more extreme conditions in a safe human environment. While the software stack driving the racing car consists of several modules, in this paper we focus on the localization problem, which provides as output the estimated pose of the vehicle needed by the planning and control modules. When driving near the friction limits, localization accuracy is critical as small errors can induce large errors in control due to the nonlinearities of the vehicle’s dynamic model. In this paper, we present a localization architecture for a racing car that does not rely on Global Navigation Satellite Systems (GNSS). It consists of two multi-rate Extended Kalman Filters and an extension of a state-of-the-art laser-based Monte Carlo localization approach that exploits some a priori knowledge of the environment and context. We first compare the proposed method with a solution based on a widely employed state-of-the-art implementation, outlining its strengths and limitations within our experimental scenario. The architecture is then tested both in simulation and experimentally on a full-scale autonomous electric racing car during an event of Roborace Season Alpha. The results show its robustness in avoiding the robot kidnapping problem typical of particle filters localization methods, while providing a smooth and high rate pose estimate. The pose error distribution depends on the car velocity, and spans on average from 0.1 m (at 60 km/h) to 1.48 m (at 200 km/h) laterally and from 1.9 m (at 100 km/h) to 4.92 m (at 200 km/h) longitudinally.
@ARTICLE{sensors2020,
author={F. {Massa} and L. {Bonamini}, and A. {Settimi} and L. {Pallottino} and D. {Caporale} },
journal={Sensors},
title=LiDAR-Based GNSS Denied Localization for Autonomous Racing Cars},
year={2020},
volume={},
number={},
pages={1-24},
doi={10.3390/s20143992}}
}