
![]() Alessandro Palleschi, Mazin Hamad, Saeed Abdolshah, Manolo Garabini, Sami Haddadin, Lucia Pallottino
Alessandro Palleschi, Mazin Hamad, Saeed Abdolshah, Manolo Garabini, Sami Haddadin, Lucia Pallottino
Fast and Safe Trajectory Planning: Solving the Cobot Performance/Safety Trade-Off in Human-Robot Shared Environments.
IEEE Robotics & Automation Letters – Vol. 6, No. 3, July 2021
Abstract
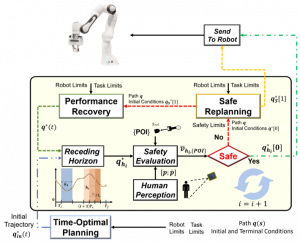
The rise of collaborative robotics has offered new opportunities for integrating automation into the factories, allowing robots and humans to work side-by-side. However, this close physical coexistence inevitably brings new constraints for ensuring safe human-robot cooperation. The current paramount challenge is integrating human safety constraints without compromising the robotic performance goals, which require minimization of the task execution time alongside ensuring its accomplishment. This paper proposes a novel robot trajectory planning algorithm to produce minimum-time yet safe motion plans along specified paths in shared workspaces with humans.
To this end, a safety module was used to evaluate the safety of a time-optimal trajectory iteratively. A safe replanning module was developed to optimally adapt the generated trajectory online whenever the optimal plan violates dynamically provided safety limits. In order to preserve performance , a recovery trajectory planning algorithm was included such that the robot is allowed to restore higher speed motions as soon as the safety concern has been resolved. The proposed solution’s effectiveness was evaluated both in simulations and real experiments with two robotic manipulators.
@ARTICLE{9420240, author={Palleschi, Alessandro and Hamad, Mazin and Abdolshah, Saeed and Garabini, Manolo and Haddadin, Sami and Pallottino, Lucia}, journal={IEEE Robotics and Automation Letters}, title={Fast and Safe Trajectory Planning: Solving the Cobot Performance/Safety Trade-Off in Human-Robot Shared Environments}, year={2021}, volume={6}, number={3}, pages={5445-5452}, doi={10.1109/LRA.2021.3076968}}