
Robin Jeanne Kirschner, Kübra Karacan, Philipp Junge, Seyed Ali Baradaran Bir-jandi, Nico Mansfeld, Saeed Abdolshah, and Sami Haddadin
Towards a Reference Framework for Tactile Robot Performance and Safety Benchmarking
Proceedings of the International Conference on Intelligent Robots and Systems (IROS)
Abstract
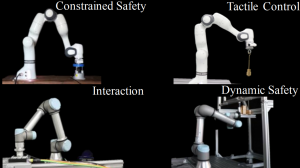
Improving robot systems via newly-developed sensing devices, control algorithms, or state estimators in order to obtain safe and efficient human-robot interaction as well as tactile manipulation skills requires standardized performance measurement protocols for objective comparison. Common protocols to evaluate robot motion performance are currently defined in EN ISO 9283:1998. For tactile and safety performance, however, no common metrics were agreed on nor standardized yet. In this paper, we propose a set of quantifiable performance criteria for robot performance analysis, objectifying robot force sensing, force control, and collision detection/reaction performance. We introduce the corresponding measurement setups and protocols, demonstrate and experimentally validate each with a Universal Robot UR10e and UR5e as well as a Franka Emika Panda robot arm. The proposed performance criteria, metrics, and experimental setups constitute the basis of a fully tactile performance and safety benchmarking framework that allows to objectively evaluate tactile robot performance via reproducible reference tests.
@inproceedings{Kirschner2021Towards,
title={Towards a Reference Framework for Tactile Robot Performance and Safety Benchmarking},
author={Kirschner, Robin Jeanne and Kurdas, Alexander and Karacan, Kübra and Junge, Philipp and Baradaran Birjandi, Seyed Ali and Mansfeld, Nico and Abdolshah, Saeed and Haddadin, Sami},
booktitle={International Conference on Intelligent Robots and Systems (IROS)},
year={2021},
organization={IEEE},
}