
![]() Laurence Roberts-Elliott, Manuel Fernandez-Carmona, and Marc Hanheide
Laurence Roberts-Elliott, Manuel Fernandez-Carmona, and Marc Hanheide
Towards Safer Robot Motion: Using a Qualitative Motion Model to Classify Human-Robot Spatial Interaction
TAROS 2020
Abstract
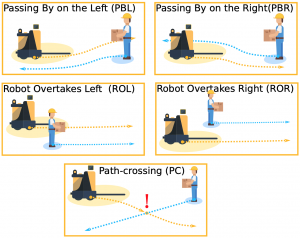 For adoption of Autonomous Mobile Robots (AMR) across a breadth of industries, they must navigate around humans in a way which is safe and which humans perceive as safe, but without greatly compromising efficiency. This work aims to classify the Human-Robot Spatial Interaction (HRSI) situation of an interacting human and robot, to be applied in Human-Aware Navigation (HAN) to account for situational context. We develop qualitative probabilistic models of relative human and robot movements in various HRSI situations to classify situations, and explain our plan to develop per-situation probabilistic models of socially legible HRSI to predict human and robot movement. In future work we aim to use these predictions to generate qualitative constraints in the form of metric cost-maps for local robot motion planners, enforcing more efficient and socially legible trajectories which are both physically safe and perceived as safe.
For adoption of Autonomous Mobile Robots (AMR) across a breadth of industries, they must navigate around humans in a way which is safe and which humans perceive as safe, but without greatly compromising efficiency. This work aims to classify the Human-Robot Spatial Interaction (HRSI) situation of an interacting human and robot, to be applied in Human-Aware Navigation (HAN) to account for situational context. We develop qualitative probabilistic models of relative human and robot movements in various HRSI situations to classify situations, and explain our plan to develop per-situation probabilistic models of socially legible HRSI to predict human and robot movement. In future work we aim to use these predictions to generate qualitative constraints in the form of metric cost-maps for local robot motion planners, enforcing more efficient and socially legible trajectories which are both physically safe and perceived as safe.
@incollection{RobertsElliott2020,
doi = {10.1007/978-3-030-63486-5_27},
url = {https://doi.org/10.1007/978-3-030-63486-5_27},
year = {2020},
publisher = {Springer International Publishing},
pages = {249--260},
author = {Laurence Roberts-Elliott and Manuel Fernandez-Carmona and Marc Hanheide},
title = {Towards Safer Robot Motion: Using a Qualitative Motion Model to Classify Human-Robot Spatial Interaction},
booktitle = {Towards Autonomous Robotic Systems}
}