
![]() Robert Krug, Yasemin Bekirogluz, and Máximo A. Roa
Robert Krug, Yasemin Bekirogluz, and Máximo A. Roa
Grasp Quality Evaluation Done Right: How Assumed Contact Force Bounds Affect Wrench-Based Quality Metrics
IEEE International Conference on Robotics and Automation (ICRA), 2017.
Abstract
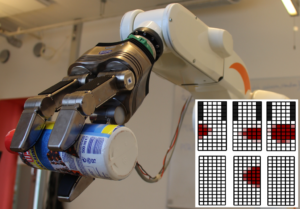
Wrench-based quality metrics play an important role in many applications such as grasp planning or grasp success prediction. In this work, we study the following discrepancy which is frequently overlooked in practice: the quality metrics are commonly computed under the assumption of sum-magnitude bounded contact forces, but the corresponding grasps are executed by a fully actuated device where the contact forces are limited independently. By means of experiments carried out in simulation and on real hardware, we show that in this setting the values of these metrics are severely underestimated. This can lead to erroneous conclusions regarding the actual capabilities of the grasps under consideration. Our findings highlight the importance of matching the physical properties of the task and the grasping device with the chosen quality metrics.
@inproceedings{krug2017graspquality,
title={Grasp Quality Evaluation Done Right: How Assumed Contact Force Bounds Affect Wrench-Based Quality Metrics},
author={Robert Krug and Yasemin Bekirogluz and Máximo A. Roa},
booktitle={Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)},
year={2017},
page={6},
}