
![]() Tomás Vintr, Sergi Molina, Ransalu Senanayake, George Broughton, Zhi Yan, Jirı Ulrich,
Tomás Vintr, Sergi Molina, Ransalu Senanayake, George Broughton, Zhi Yan, Jirı Ulrich,
Tomasz Piotr Kucner, Chittaranjan Srinivas Swaminathan, Filip Majer, Mária Stachová,
Achim J. Lilienthal, and Tomás Krajník
Time-varying Pedestrian Flow Models for Service Robots
Proceedings of the European Conference on Mobile Robotics (ECMR) 2019
Abstract
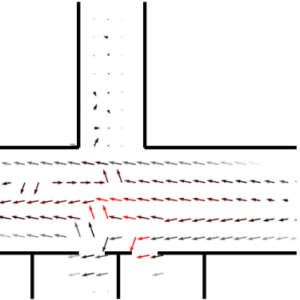
We present a human-centric spatiotemporal model for service robots operating in densely populated environments for long time periods. The method integrates observations of pedestrians performed by a mobile robot at different locations and times into a memory efficient model, that represents the spatial layout of natural pedestrian flows and how they change over time. To represent temporal variations of the observed flows, our method does not model the time in a linear fashion, but by several dimensions wrapped into themselves. This representation of time can capture long-term (i.e. days to weeks) periodic patterns of peoples’ routines and habits. Knowledge of these patterns allows making long-term predictions of future human presence and walking directions, which can support mobile robot navigation in human-populated environments. Using datasets gathered for several weeks, we compare the model to state-of-the-art methods for pedestrian flow modelling.
@inproceedings{vintr2019time},
title={Time-varying Pedestrian Flow Models for Service Robots},
author={Tom{\'a}{\v s} Vintr and Sergi Molina and Ransalu Senanayake and George Broughton and Zhi Yan and Ji{\v r}{\' i} Ulrich and Tomasz Piotr Kucner and Chittaranjan Srinivas Swaminathan and Filip Majer and M{\'a}ria Stachov{\'a} and Achim J. Lilienthal and Tom{\'a}{\v s} Krajn{\'i}k},
booktitle={European Conference on Mobile Robotics},
year={2019},
note={Accepted},
}