
![]() Sergio Molina Mellado, Grzegorz Cielniak, and Tom Duckett
Sergio Molina Mellado, Grzegorz Cielniak, and Tom Duckett
Robotic exploration for learning human motion patterns
IEEE Transactions on Robotics
Abstract
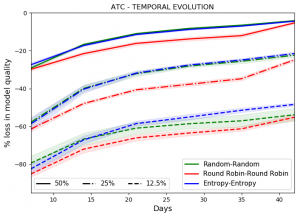
Understanding how people are likely to move is key to efficient and safe robot navigation in human environments. However, mobile robots can only observe a fraction of the environment at a time, while the activity patterns of people may also change at different times. This article introduces a new methodology for mobile robot exploration to maximize the knowledge of human activity patterns by deciding where and when to collect observations. We introduce an exploration policy driven by the entropy levels in a spatio-temporal map of pedestrian flows, and compare multiple spatio-temporal exploration strategies including both in-formed and uninformed approaches. The evaluation is performed by simulating mobile robot exploration using real sensory data from three long-term pedestrian datasets. The results show that for certain scenarios the models built with proposed exploration system can better predict the flow patterns than uninformed strategies, allowing the robot to move in a more socially compliant way, and that the exploration ratio is a key factor when it comes to the model prediction accuracy.
@article{molina2021robotic,
title={Robotic Exploration for Learning Human Motion Patterns},
author={Molina, Sergi and Cielniak, Grzegorz and Duckett, Tom},
journal={IEEE Transactions on Robotics},
year={2021},
publisher={IEEE}
}