
2018
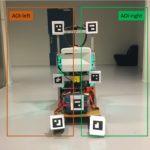
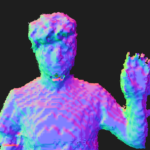
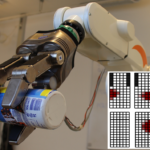
Accessing your navigation plans! Human Robot Intention Transfer using Eye Tracking Glasses
Ravi Teja Chadalavada, Henrik Andreasson, Maike Schindler, Rainer Palm, and Achim J. Lilienthal. Proceedings of the 16th International Conference on Manufacturing Research (ICMR) 2018.
Motion Planning and Goal Assignment for Robot Fleets Using Trajectory Optimization
João Salvado, Federico Pecora, Masoumeh Mansouri, and Robert Krug. 2018 IEEE International Conference on Intelligent Robots and Systems (IROS).
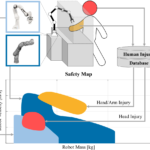
Safety Map: A Tool for Global Robot Safety Evaluation and Safe Robot Design
Nico Mansfeld, Mazin Hamad, Marvin Becker, Antonio Gonzales Marin, and Sami Haddadin. 2018 IEEE International Conference on Robotics and Automation (ICRA).

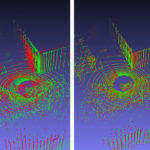
Learning monocular visual odometry with dense 3D mapping from dense 3D flow
Cheng Zhao, Li Sun, Pulak Purkait, Tom Duckett, and Rustam Stolkin. Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS) 2018.
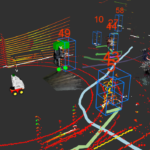
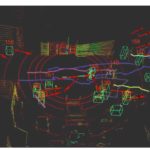
Multisensor Online Transfer Learning for 3D LiDAR-based Human Detection with a Mobile Robot
Zhi Yan, Li Sun, Tom Duckett, and Nicola Bellotto. Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS) 2018.
Dense RGB-D Semantic Mapping with Pixel-Voxel Neural Network
Cheng Zhao, Li Sun, Pulak Purkait , Tom Duckett, and Rustam Stolkin. Sensors.

Recurrent-OctoMap: Learning State-based Map Refinement for Long-Term Semantic Mapping with 3D-Lidar Data
Li Sun, Zhi Yan, Anestis Zaganidis, Cheng Zhao, and Tom Duckett. IEEE Robotics and Automation Letters.
Integrating Deep Semantic Segmentation Into 3-D Point Cloud Registration
Anestis Zaganidis, Li Sun, Tom Duckett, and Grzegorz Cielniak. IEEE Robotics and Automation Letters.

Introduction to the Special Issue on AI for Long-Term Autonomy
Lars Kunze, Nick Hawes, Tom Duckett, and Marc Hanheide. IEEE Robotics and Automation Letters.

Artificial Intelligence for Long-Term Robot Autonomy: A Survey
Lars Kunze, Nick Hawes, Tom Duckett, Marc Hanheide, and Tomás Krajník. IEEE Robotics and Automation Letters.
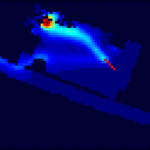
Modelling and Predicting Rhythmic Flow Patterns in Dynamic Environments
Sergi Molina, Grzegorz Cielniak, Tomás Krajník, and Tom Duckett. 2018 Conference Towards Autonomous Robotic Systems (TAROS).
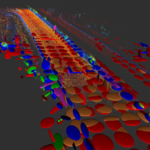
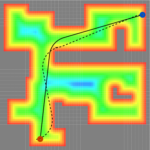
Down The CLiFF: Flow-aware Trajectory Planning under Motion Pattern Uncertainty
Chittaranjan Srinivas Swaminathan, Tomasz Piotr Kucner, Martin Magnusson, Luigi Palmieri, and Achim J. Lilienthal. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
Improving Localisation Accuracy using Submaps in Warehouses
Daniel Adolfsson, Stephanie Lowry, and Henrik Andreasson. IROS 2018: Workshop on Robotics for Logistics in Warehouses and Environments Shared with Humans.
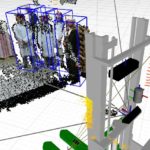
Towards Accurate 3D Person Detection and Localization from RGB-D in Cluttered Environments
Timm Linder, Dennis Griesser, Narunas Vaskevicius, and Kai O. Arras. IROS 2018: Workshop on Robotics for Logistics in Warehouses and Environments Shared with Humans.
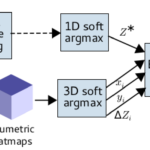
Synthetic Occlusion Augmentation with Volumetric Heatmaps for the 2018 ECCV PoseTrack Challenge on 3D Human Pose Estimation
István Sárándi, Timm Linder, Kai O. Arras, and Bastian Leibe. European Conference on Computer Vision (ECCV) 2018 Workshops. [Winner of 2018 PoseTrack 3D Challenge]

Human Motion Prediction Under Social Grouping Constraints
Andrey Rudenko, Luigi Palmieri, Achim J. Lilienthal, and Kai O. Arras. Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS) 2018.
[Awards finalist: Best Paper Award on Safety Security and Rescue Robotics]

How Robust is 3D Human Pose Estimation to Occlusion?
István Sárándi, Timm Linder, Kai O. Arras, and Bastian Leibe. IROS 2018: Workshop on Robotic Co-workers 4.0: Human Safety and Comfort in Human-Robot Interactive Social Environments.
Deep Person Detection in Two-Dimensional Range Data
Lucas Beyer, Alexander Hermans, Timm Linder, Kai O. Arras, and Bastian Leibe.
IEEE Robotics and Automation Letters (RA-L) with presentation at IROS, 2018.
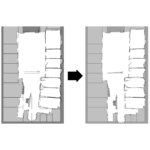
Nonlinear Optimization of Multimodal 2D Map Alignment with Application to Prior Knowledge Transfer
Saeed Gholami Shahbandi, Martin Magnusson, and Karl Iagnemma.
IEEE Robotics and Automation Letters.

2D Map Alignment with Region Decomposition
Saeed Gholami Shahbandi and Martin Magnusson.
Autonomous Robots.
Safety Map: A Unified Representation for Biomechanics Impact Data and Robot Instantaneous Dynamic Properties
Nico Mansfeld , Mazin Hamad , Marvin Becker, Antonio Gonzales Marin, and Sami Haddadin. IEEE Robotics and Automation Letters.
A Survey of Voxel Interpolation Methods and an Evaluation of Their Impact on Volumetric Map-Based Visual Odometry
Daniel Ricão Canelhas, Todor Stoyanov, and Achim J. Lilienthal. IEEE International Conference on Robotics and Automation (ICRA) 2018.

A Loosely-Coupled Approach for Multi-Robot Coordination, Motion Planning and Control
Federico Pecora, Henrik Andreasson, Masoumeh Mansouri and Vilian Petkov.
Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS).
3DOF Pedestrian Trajectory Prediction Learned from Long-Term Autonomous Mobile Robot Deployment Data
Li Sun, Zhi Yan, Sergi Molina Mellado, Marc Hanheide, and Tom Duckett. IEEE International Conference on Robotics and Automation (ICRA) 2018.

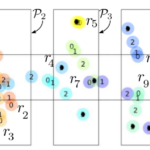
Joint Long-Term Prediction of Human Motion Using a Planning-Based Social Force Approach
Andrey Rudenko, Luigi Palmieri, and Kai Oliver Arras.
IEEE International Conference on Robotics and Automation (ICRA) 2018.
Gradient-Informed Path Smoothing for Wheeled Mobile Robots
Eric Heiden, Luigi Palmieri, Sven Koenig, Kai Oliver Arras, and Gaurav Sukhatme.
IEEE International Conference on Robotics and Automation (ICRA) 2018.
2017
FreMEn: Frequency Map Enhancement for Long-Term Mobile Robot Autonomy in Changing Environments
Tomas Krajnik, Jaime P. Fentanes, Joao M. Santos, and Tom Duckett. IEEE Transactions on Robotics

Spatiotemporal Models for Motion Planning in Human Populated Environments
Tomas Vintr, Sergi Mellado Molina, Grzegorz Cielniak, Tom Duckett and Tomas Krajnik. 2017 Student Conference on Planning in Artificial Intelligence and Robotics (PAIR).

Improving the Performance of Biomechanically Safe Velocity Control for Redundant Robots through Reflected Mass Minimization
Nico Mansfeld, Badis Djellab, Jaime Raldúa Veuthey, Fabian Beck, Christian Ott, and Sami Haddadin. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2017.

Modelling and Predicting Rhythmic Flow Patterns in Dynamic Environments
Sergi Molina, Grzegorz Cielniak, Tomáš Krajník, and Tom Duckett.
Proceedings of the UK-RAS Network Conference.

Navigation Testing for Continuous Integration in Robotics
Jaime Pulido Fentanes, Christian Dondrup, and Marc Hanheide.
UK-RAS Conference on Robotics and Autonomous Systems (RAS 2017).
Learning to Detect Misaligned Point Clouds
Håkan Almqvist, Martin Magnusson, Tomasz Piotr Kucner, and Achim J. Lilienthal.
Journal of Field Robotics (Volume: 35, Issue: 5).
Semantic-Assisted 3D Normal Distributions Transform for Scan Registration in Environments with Limited Structure
Anestis Zaganidis, Martin Magnusson, Tom Duckett, and Grzegorz Cielniak.
Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS) 2017.
Incorporating Ego-motion Uncertainty Estimates in Range Data Registration
Henrik Andreasson, Daniel Adolfsson, Todor Stoyanov, Martin Magnusson, and Achim J. Lilienthal.
Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS) 2017.
Semi-Supervised 3D Place Categorisation by Descriptor Clustering
Martin Magnusson, Tomasz Piotr Kucner, Saeed Gholami Shahbandi, Henrik Andreasson, and Achim J. Lilienthal.
Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS) 2017.
Hybrid Curvature Steer: A Novel Extend Function for Sampling-Based Nonholonomic Motion Planning in Tight Environments
Holger Banzhaf, Luigi Palmieri, Dennis Nienhüser, Thomas Schamm, Steffen Knoop, and J. Marius Zöllner.
IEEE ITSC 2017, IEEE 20th International Conference on Intelligent Transportation Systems.
Grasp Quality Evaluation Done Right: How Assumed Contact Force Bounds Affect Wrench-Based Quality Metrics
Robert Krug, Yasemin Bekirogluz, and Máximo A. Roa.
IEEE International Conference on Robotics and Automation (ICRA), 2017.
Predictive Planning for a Mobile Robot in Human Environments
Andrey Rudenko, Luigi Palmieri, and Kai O. Arras.
Workshop on AI Planning and Robotics: Challenges and Methods (ICRA), 2017.
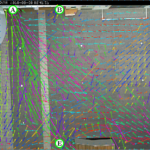
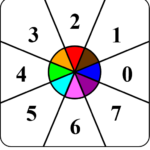
Enabling Flow Awareness for Mobile Robots in Partially Observable Environments
Tomasz Piotr Kucner, Martin Magnusson, Erik Schaffernicht, Victor Hernandez Bennetts, and Achim J. Lilienthal.
IEEE Robotics and Automation Letters.

Noninteracting Constrained Motion Planning and Control for Robot Manipulators
Manuel Bonilla, Lucia Pallottino, and Antonio Bicchi.
IEEE International Conference on Robotics and Automation (ICRA), 2017.
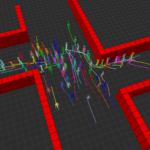
Kinodynamic Motion Planning on Gaussian Mixture Fields
Luigi Palmieri, Tomasz Kucner, Martin Magnusson, Achim J. Lilienthal, and Kai O. Arras.
IEEE International Conference on Robotics and Automation (ICRA), 2017.
Journal papers
Conference papers