
![]() Robin Jeanne Kirschner, João Jantalia, Nico Mansfeld, Saeed Abdolshah and Sami Haddadin.
Robin Jeanne Kirschner, João Jantalia, Nico Mansfeld, Saeed Abdolshah and Sami Haddadin.
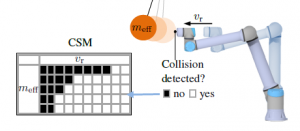
CSM : Contact Sensitivity Maps for Benchmarking Robot Collision Handling Systems.
Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021, p. 2319.
Abstract
For the user of a collaborative robot, it is important to select robot parameters and trajectories such that the task is fulfilled while ensuring human safety at the same time. In human robot interaction (HRI), constrained collisions can be particularly hazardous to the human and recently, collision test devices were developed that assess safety in such scenarios. In this paper, we propose the concept of a constrained collision force map (CCFM), which relates the robot impact velocity and the collision reaction method its parameterization to the peak collision force in a constrained collision scenario. The CCFM is a tool that will help practitioners to implement both safe and efficient HRI applications and to understand the robot’s collision behavior. In this work, we derive the CCFM for three robots (UR10e, UR5e, and Franka Emika Panda) for varying contact thresholds, contact stiffnesses, and robot poses. Finally, we compare our results with the force estimation suggested by ISO/TS 15066:2016.
@inproceedings{kirschnercsm, title={CSM : Contact Sensitivity Maps for Benchmarking Robot Collision Handling Systems}, author={Kirschner, R.J. and Mansfeld, N. and Abdolshah, S. and Haddadin, S.}, booktitle = "Proceedings of the 2021 IEEE International Conference on Robotics and Automation", year = {2021}, }