
![]() Tomas Vintr, Sergi Mellado Molina, Grzegorz Cielniak, Tom Duckett and Tomas Krajnik
Tomas Vintr, Sergi Mellado Molina, Grzegorz Cielniak, Tom Duckett and Tomas Krajnik
Spatiotemporal models for motion planning in human populated environments
2017 Student Conference on Planning in Artificial Intelligence and Robotics (PAIR)
Abstract
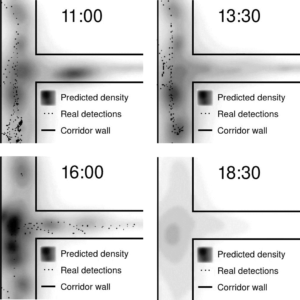
In this paper we present an effective spatio-temporal model for motion planning computed using a novel representation known as the temporary warp space-hypertime continuum. Such a model is suitable for robots that are expected to be helpful to humans in their natural environments. This method allows to capture natural periodicities of human behavior by adding additional time dimensions. The model created thus represents the temporal structure of the human habits within a given space and can be analyzed using regular analytical methods. We visualize the results on a real-world dataset using heatmaps.
@inproceedings{Vintr2017,
author = {Tomas Vintr and Sergi Molina Mellado and Grzegorz Cielniak and Tom Duckett and Tomas Krajnik},
booktitle = {Student Conference on Planning in Artificial Intelligence and Robotics (PAIR)},
publisher = {Czech Technical University in Prague, Faculty of Electrical Engineering},
year = {2017},
title = {Spatiotemporal models for motion planning in human populated environments},
month = {September},
url = {http://eprints.lincoln.ac.uk/31052/}
}