
![]() Masoumeh Mansouri, Bruno Lacerda, Nick Hawes, and Federico Pecora
Masoumeh Mansouri, Bruno Lacerda, Nick Hawes, and Federico Pecora
Multi-Robot Planning Under Uncertain Travel Times and Safety Constraints
Proceedings of the Twenty-Eighth International Joint Conference on Artificial Intelligence, IJCAI-19
Abstract
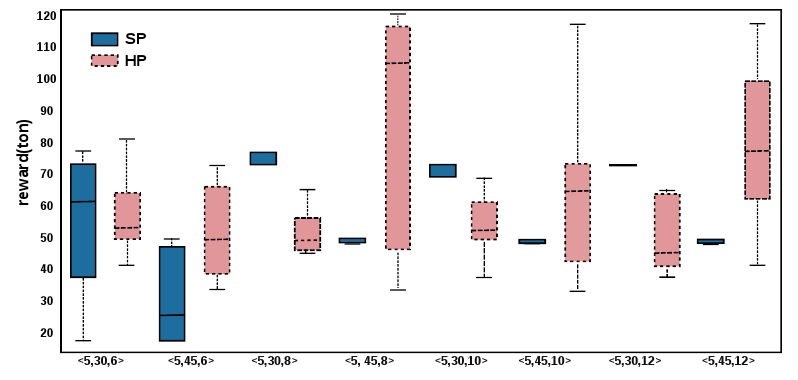
We present a novel modelling and planning approach for multi-robot systems under uncertain travel times. The approach uses generalised stochastic Petri nets (GSPNs) to model desired team behaviour, and allows to specify safety constraints and rewards. The GSPN is interpreted as a Markov decision process (MDP) for which we can generate policies that optimise the requirements. This representation is more compact than the equivalent multi-agent MDP, allowing us to scale better. Furthermore, it naturally allows for asynchronous execution of the generated policies across the robots, yielding smoother team behaviour. We also describe how the integration of the GSPN with a lower-level team controller allows for accurate expectations on team performance. We evaluate our approach on an industrial scenario, showing that it outperforms hand-crafted policies used in current practice.
@inproceedings{ijcai2019-68,
title = {Multi-Robot Planning Under Uncertain Travel Times and Safety Constraints},
author = {Mansouri, Masoumeh and Lacerda, Bruno and Hawes, Nick and Pecora, Federico},
booktitle = {Proceedings of the Twenty-Eighth International Joint Conference on
Artificial Intelligence, {IJCAI-19}},
publisher = {International Joint Conferences on Artificial Intelligence Organization},
pages = {478--484},
year = {2019},
month = {7},
doi = {10.24963/ijcai.2019/68},
url = {https://doi.org/10.24963/ijcai.2019/68},
}