
![]() Malcolm Mielle, Martin Magnusson, and Achim J. Lilienthal
Malcolm Mielle, Martin Magnusson, and Achim J. Lilienthal
URSIM: Unique Regions for Sketch map Interpretation and Matching
Robotics (Volume: 8, Issue: 2, 2019)
Abstract
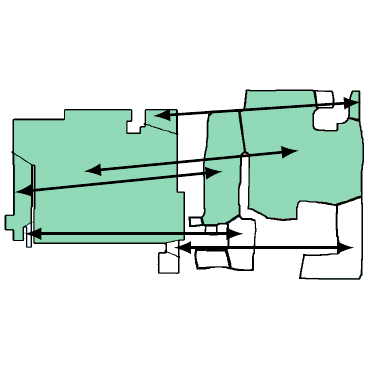
We present a method for matching sketch maps to a corresponding metric map, with the aim of later using the sketch as an intuitive interface for human–robot interactions. While sketch maps are not metrically accurate and many details, which are deemed unnecessary, are omitted, they represent the topology of the environment well and are typically accurate at key locations. Thus, for sketch map interpretation and matching, one cannot only rely on metric information. Our matching method first finds the most distinguishable, or unique, regions of two maps. The topology of the maps, the positions of the unique regions, and the size of all regions are used to build region descriptors. Finally, a sequential graph matching algorithm uses the region descriptors to find correspondences between regions of the sketch and metric maps. Our method obtained higher accuracy than both a state-of-the-art matching method for inaccurate map matching, and our previous work on the subject. The state of the art was unable to match sketch maps while our method performed only 10% worse than a human expert.
@article{mielle-2019-ursim,
author = {Mielle, Malcolm and Magnusson, Martin and Lilienthal, Achim J.},
title = {{URSIM}: Unique Regions for Sketch map Interpretation and Matching},
journal = {Robotics},
publisher = {MDPI},
year = {2019},
volume = 8,
number = 2,
doi = 10.3390/robotics8020043,
}