
![]() Alessandro Palleschi, Marco Gugliotta, Chiara Gabellieri, Dinh-Cuong Hoang, Todor Stoyanov, Manolo Garabini, Lucia Pallottino. Fully Autonomous Picking with a Dual-Arm Platform for Intralogistics. Proceedings of the 2nd Italian Conference on Robotics and Intelligent Machines, 2020
Alessandro Palleschi, Marco Gugliotta, Chiara Gabellieri, Dinh-Cuong Hoang, Todor Stoyanov, Manolo Garabini, Lucia Pallottino. Fully Autonomous Picking with a Dual-Arm Platform for Intralogistics. Proceedings of the 2nd Italian Conference on Robotics and Intelligent Machines, 2020
Abstract
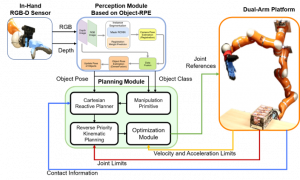
Despite the strong demand for solutions and the intense research effort, fully autonomous object manipulation is not yet solved. One of the main challenges is the large variety of conditions in which the objects should be handled. There is a need for solutions that integrate both advanced perception systems for object recognition and pose estimation and robust planning algorithms. In this work, we present a fully autonomous dual-arm picking platform for intralogistics. The system is the result of the integration of a dual-arm manipulation system with a perception system for object registration, 3D instance-aware mapping, and 6D pose estimation of the objects. Eventually, we present the results of experiments on objects and conditions relevant to the intralogistics domain to assess the performance of the system.
@inproceedings{palleschifully, title={Fully Autonomous Picking with a Dual-Arm Platform for Intralogistics}, author={Palleschi, Alessandro and Gugliotta, Marco and Gabellieri, Chiara and Hoang, Dinh-Cuong and Stoyanov, Todor and Garabini, Manolo and Pallottino, Lucia}, booktitle = "Proceedings of the 2nd Italian Conference on Robotics and Intelligent Machines", year = {2020}, }