
![]() Chiara Gabellieri, Franco Angelini, Visar Arapi, Alessandro Palleschi, Manuel G. Catalano, Giorgio Grioli, Lucia Pallotino, Antonio Bicchi, Matteo Bianchi, and Manolo Garabini
Chiara Gabellieri, Franco Angelini, Visar Arapi, Alessandro Palleschi, Manuel G. Catalano, Giorgio Grioli, Lucia Pallotino, Antonio Bicchi, Matteo Bianchi, and Manolo Garabini
Grasp It Like a Pro: Grasp of Unknown Objects With Robotic Hands Based on Skilled Human Expertise
IEEE Robotics and Automation Letters (Vol. 5, No. 2, April 2020)
Abstract
This work proposes a method to grasp unknown objects with robotic hands based on demonstrations by a skilled human operator. Not only are humans efficacious at grasping with
their own hands but are also capable of grasping objects using robotic hands. Therefore, we consider how the grasping skills of a human trained in robotic hand use can be transferred to a robot equipped with the same hand. We propose that a skilled human user manually operates the robotic hand to grasp a number of elementary objects, consisting of different boxes. A Decision Tree
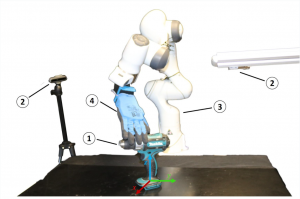
Regressor is trained on the data acquired from the human operator to generate hand poses able to grasp a general box. This is extended to grasp objects of unknown and general shape leveraging upon the state-of-the-art Minimum Volume Bounding Box decomposition algorithm that approximates with a number of boxes the point cloud of the object. We report on extensive tests of the proposed approach on a Panda manipulator equipped with a Pisa/IIT Soft-Hand, achieving a success rate of 86.7% over 105 grasps of 21 different objects.
@article {3911,
title = {Grasp It Like a Pro: Grasp of Unknown Objects With Robotic Hands Based on Skilled Human Expertise},
journal = {IEEE Robotics and Automation Letters},
volume = {5},
year = {2020},
month = {02/2020},
chapter = {2808},
doi = {https://doi.org/10.1109/LRA.2020.2974391}
url = {https://ieeexplore.ieee.org/document/9000707/authors$\#$authors},
author={C. Gabellieri and F. Angelini and V. Arapi and A. Palleschi and M. G. Catalano and G. Grioli and L. Pallottino and A. Bicchi and M. Bianchi and M. Garabini},
}