
![]() Andrey Rudenko and Luigi Palmieri and Michael Herman and Kris M Kitani and Dariu M Gavrila and Kai O Arras
Andrey Rudenko and Luigi Palmieri and Michael Herman and Kris M Kitani and Dariu M Gavrila and Kai O Arras
Human Motion Trajectory Prediction: A Survey
The International Journal of Robotics Research (Volume: 39, Issue: 8, pages: 895-935, 2020)
Abstract
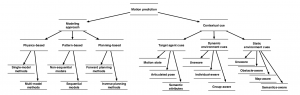
With growing numbers of intelligent autonomous systems in human environments, the ability of such systems to perceive, understand, and anticipate human behavior becomes increasingly important. Specifically, predicting future positions of dynamic agents and planning considering such predictions are key tasks for self-driving vehicles, service robots, and advanced surveillance systems. This article provides a survey of human motion trajectory prediction. We review, analyze, and structure a large selection of work from different communities and propose a taxonomy that categorizes existing methods based on the motion modeling approach and level of contextual information used. We provide an overview of the existing datasets and performance metrics. We discuss limitations of the state of the art and outline directions for further research.
@article{rudenkoIJRR2020,
author = {Andrey Rudenko and Luigi Palmieri and Michael Herman and Kris M Kitani and Dariu M Gavrila and Kai O Arras},
title ={Human motion trajectory prediction: a survey},
journal = {The International Journal of Robotics Research},
volume = {39},
number = {8},
pages = {895-935},
year = {2020},
doi = {10.1177/0278364920917446}
}