
![]() Dinh-Cuong Hoang, Todor Stoyanov, and Achim J. Lilienthal
Dinh-Cuong Hoang, Todor Stoyanov, and Achim J. Lilienthal
Object-RPE: Dense 3D Reconstruction and pose estimation with convolutional neural networks
Robotics and Autonomous Systems, Vol 133, November 2020
Abstract
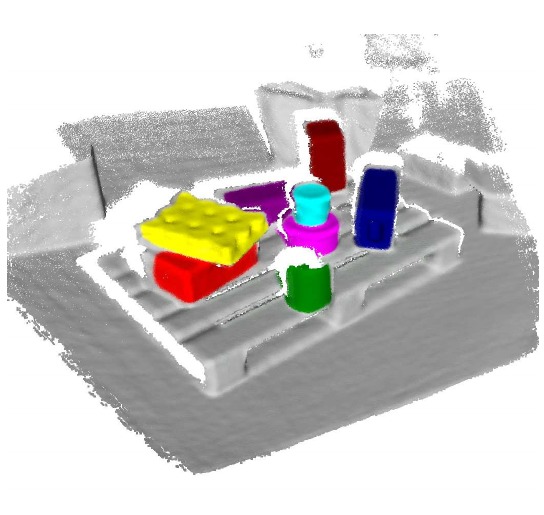
We present a system for accurate 3D instance-aware semantic reconstruction and 6D pose estimation, using an RGB-D camera. Our framework couples convolutional neural networks (CNNs) and a state-of-the-art dense Simultaneous Localisation and Mapping (SLAM) system, ElasticFusion, to achieve both high-quality semantic reconstruction as well as robust 6D pose estimation for relevant objects. The method presented in this paper extends a high-quality instance-aware semantic 3D Mapping system from previous work by adding a 6D object pose estimator. While the main trend in CNN-based 6D pose estimation has been to infer object’s position and orientation from single views of the scene, our approach explores performing pose estimation from multiple viewpoints, under the conjecture that combining multiple predictions can improve the robustness of an object detection system. The resulting system is capable of producing high-quality object-aware semantic reconstructions of room-sized environments, as well as accurately detecting objects and their 6D poses. The developed method has been verified through experimental validation on the YCB-Video dataset and a newly collected warehouse object dataset. Experimental results confirmed that
the proposed system achieves improvements over state-of-the-art methods in terms of surface reconstruction and object pose prediction. Our code and video are available at https://sites.google.com/view/object-rpe.
@article{hoang2020object,
title={Object-RPE: Dense 3D reconstruction and pose estimation with convolutional neural networks},
author={Hoang, Dinh-Cuong and Lilienthal, Achim J and Stoyanov, Todor},
journal={Robotics and Autonomous Systems},
volume={133},
pages={103632},
year={2020},
publisher={Elsevier}
}