
![]() Mazin Hamad, Alexander Kurdas, Saeed Abdolshah, Sami Haddadin.
Mazin Hamad, Alexander Kurdas, Saeed Abdolshah, Sami Haddadin.
A Robotics Perspective on Experimental Injury Biomechanics of Human Body Upper Extremities.
2021 IEEE International Conference on Intelligence and Safety for Robotics (ISR) 2021 Mar 4 (pp. 316-320).
Abstract
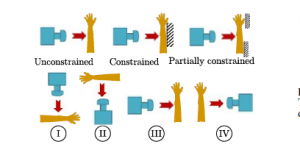
Achieving a better understanding of injury mechanisms and significant factors affecting safety in robotics requires large amounts of ground-truth, medically classified biomechanical information. Representing impact data-sets as relationships between input parameters (reflected mass, velocity, injury) for different impact curvatures and test setups versus injury was previously proven to be very efficient for ensuring human safety through real-time robot control algorithms. However, such a data-driven safety framework requires enough data-sets to cover all practical collision incidents. In this work, resulting data-sets from our extensive literature review process on the human body upper extremities are summarized. We also adapt our previously developed robotics-compatible representations in terms of standardized testing setups, impact scenarios, and collision cases to distinctly categorize impact-testing experiments on the human body upper extremities. Each category can then be differentiated by a minimal representative set of test arrangements to unify the description, storage, reporting, and comparison of experimental settings and results. This way, every new impact test/incident can be easily categorized and compared against others in the developed digital database.
@inproceedings{kirschnerarobotics, title={A Robotics Perspective on Experimental Injury Biomechanics of Human Body Upper Extremities}, author={Hamad, M. and Kurdas, A. and Abdolshah, S. and Haddadin, S.}, booktitle = 2021 IEEE International Conference on Intelligence and Safety for Robotics, year = {2021}, }