
![]() Daniel Adolfsson, Martin Magnusson, Anas W. Alhashimi, Achim J. Lilienthal, and Henrik Andreasson
Daniel Adolfsson, Martin Magnusson, Anas W. Alhashimi, Achim J. Lilienthal, and Henrik Andreasson
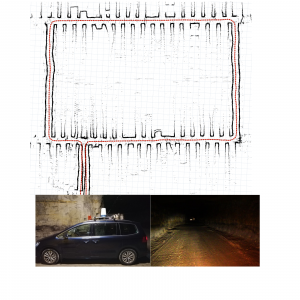
CFEAR Radarodometry – Conservative Filtering for Efficientand Accurate Radar Odometry
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021)
Abstract
@inproceedings{cfear,
author = {Daniel Adolfsson and Martin Magnusson and Anas W. Alhashimi and Achim J. Lilienthal and Henrik Andreasson},
title = {{CFEAR} Radarodometry - Conservative Filtering for Efficient and Accurate Radar Odometry},
booktitle={Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems},
date = {2021-09},
}