
![]() João Salvado, Masoumeh Mansouri, and Federico Pecora
João Salvado, Masoumeh Mansouri, and Federico Pecora
Combining Multi-Robot Motion Planning and Goal Allocation using Roadmaps
IEEE International Conference on Robotics and Automation (ICRA). 2021.
Abstract
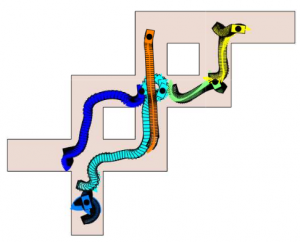
This paper addresses the problem of automating fleets of robots with non-holonomic dynamics. Previously studied methods either specialize in facets of this problem, that is, one or a combination of multi-robot goal allocation, motion planning, and coordination, and typically acrifice optimality and completeness for scalability. We propose an approach that constructs an abstract multi-robot roadmap in a reduced configuration space, where we account for environment connectivity and interference cost between robots occupying the same polygons. Querying the road-map results in a robot-goal assignment and abstract multi-robot trajectory. This is then exploited to de-compose the original problem into smaller problems, each of which is solved with a multi-robot motion planner that accounts for kinodynamic constraints. We validate the approach experimentally to demonstrate the advantage of considering task assignment and motion planning holistically, and explore some methods for balancing solution quality and computational efficiency.
@inproceedings{salvado2021ICRA,
title={Combining Multi-Robot Motion Planning and Goal Allocation using Roadmaps},
author={Salvado, J. and Mansouri, M. and Pecora, F.},
booktitle={IEEE International Conference on Robotics and Automation (ICRA)},
year={2021},
}