
![]() Robin Jeanne Kirschner, Lisa Burr, Melanie Porzenheim, Henning Mayer, Saeed Abdolshah and Sami Haddadin. Involuntary Motion in Human-Robot Interaction: Effect of Interactive User Training on the Occurrence of Human Startle-Surprise Motion. 2021 IEEE International Conference on Intelligence and Safety for Robotics (ISR) 2021 Mar 4 (pp. 28-32).
Robin Jeanne Kirschner, Lisa Burr, Melanie Porzenheim, Henning Mayer, Saeed Abdolshah and Sami Haddadin. Involuntary Motion in Human-Robot Interaction: Effect of Interactive User Training on the Occurrence of Human Startle-Surprise Motion. 2021 IEEE International Conference on Intelligence and Safety for Robotics (ISR) 2021 Mar 4 (pp. 28-32).
Abstract
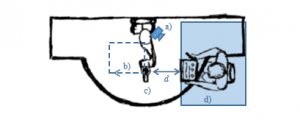
In human-robot interaction (HRI) high relative velocity between robot and human at collision may lead to severe injury. Human rapid involuntary motion (IM) may therefore be a safety hazard resulting from startle or surprise (StSu). The arousal that may cause such motion can be reduced by habituation effects, indicating that user application training leads to improved safety in HRI. We suggest using an introductory hands-on user training and investigate whether it can influence the occurrence of IM. An exploratory experiment was performed with 21 participants. During the experiment a robot frontally approached the human six times. The experiment was repeated before and after a hands-on training session. We observe whether the participants show cues of StSu at the approach and compare the quantity of these cues occurring before and after hands-on robot introductory training. Our findings show promising results for the hands-on introductory training to positively effect the psychological and physical safety in HRI
@inproceedings{kirschnerinvoluntary, title={Involuntary Motion in Human-Robot Interaction: Effect of Interactive User Training on the Occurrence of Human Startle-Surprise Motion}, author={Kirschner, R.J. and Burr, L. and Porzenheim M. and Mayer, H. and Abdolshah, S. and Haddadin, S.}, booktitle = "2021 IEEE International Conference on Intelligence and Safety for Robotics", year = {2021}, }