
![]() Manuel Fernandez-Carmona, Tejas Parekh, and Marc Hanheide
Manuel Fernandez-Carmona, Tejas Parekh, and Marc Hanheide
Making the Case for Human-aware Navigation in Warehouses
Towards Autonomous Robotic Systems—20th Annual Conference
Abstract
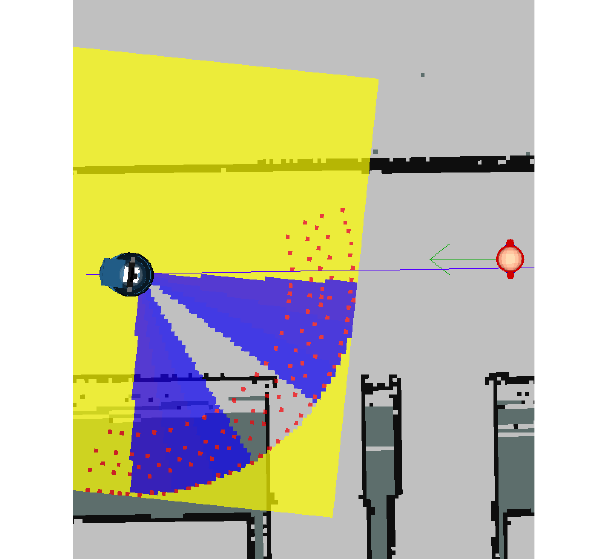
This work addresses the performance of several local planners for navigation of autonomous pallet trucks in the presence of humans in a simulated warehouse as well as a complementary approach developed within the ILIAD project. Our focus is to stress the open problem of a safe manoeuvrability of pallet trucks in the presence of moving humans. We propose a variation of ROS navigation stack that includes in the planning process a model of the human robot interaction.
@incollection{FernandezCarmona2019,
doi = {10.1007/978-3-030-25332-5_38},
url = {https://doi.org/10.1007/978-3-030-25332-5_38},
year = {2019},
publisher = {Springer International Publishing},
pages = {449--453},
author = {Manuel Fernandez Carmona and Tejas Parekh and Marc Hanheide},
title = {Making the Case for Human-Aware Navigation in Warehouses},
booktitle = {Towards Autonomous Robotic Systems}
}