
![]() Seyed Ali Baradaran Birjandi and Sami Haddadin
Seyed Ali Baradaran Birjandi and Sami Haddadin
Model-Adaptive High-Speed Collision Detection for Serial-Chain Robot
Manipulators
IEEE Robotics and Automation Letters (Volume: 5, Issue: 4, 2020)
Abstract
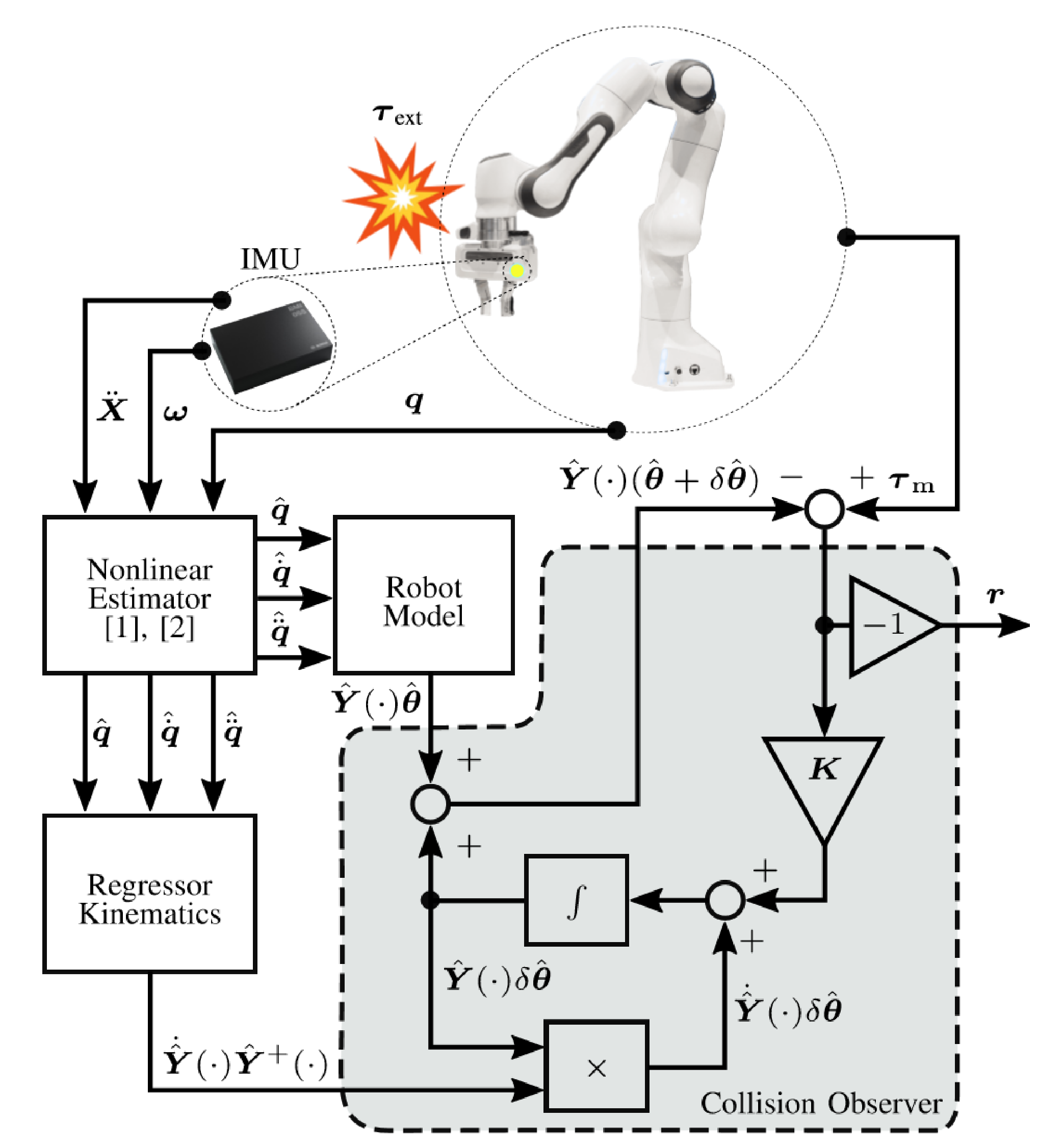
In this letter, we introduce a novel regressor-based observer method to adapt an initially erroneous dynamics model of serial manipulators for improving collision detection sensitivity. Specifically, we assume that the robot joint velocity and acceleration can be accurately estimated via our previously introduced nonlinear estimator that fuses Inertial measurement unit (IMU) measurements with the robot proprioceptive sensing. Given the relatively high bandwidth of nowadays IMUs compared to a standard robot sensorization, the estimated kinematic joint variables support the prompt detection of unpredictable collisions. Compared to the state of the art, our algorithm notably improves collision detection accuracy and sensitivity, surpassing traditional methods such as the well established momentum based scheme. We support our claims and demonstrate the performance of our algorithm on a 7 degree of freedom (DoF) robot manipulator, both in simulation and experiment.
@article{birjandi2020model,
title={Model-Adaptive High-Speed Collision Detection for Serial-Chain Robot Manipulators},
author={Birjandi, Seyed Ali Baradaran and Haddadin, Sami},
journal={IEEE Robotics and Automation Letters},
volume={5},
number={4},
pages={6544--6551},
year={2020},
publisher={IEEE}
}