
![]() João Salvado, Federico Pecora, Masoumeh Mansouri, and Robert Krug
João Salvado, Federico Pecora, Masoumeh Mansouri, and Robert Krug
Motion Planning and Goal Assignment for Robot Fleets Using Trajectory Optimization
2018 IEEE International Conference on Intelligent Robots and Systems (IROS)
Abstract
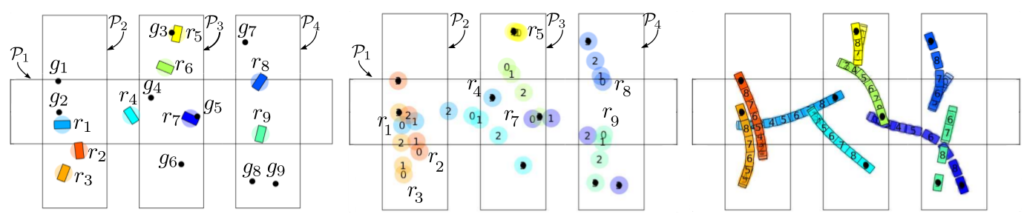
This paper is concerned with automating fleets of autonomous robots. This involves solving a multitude of problems, including goal assignment, motion planning, and coordination, while maximizing some performance criterion. While methods for solving these sub-problems have been studied, they address only a facet of the overall problem, and make strong assumptions on the use-case, on the environment, or on the robots in the fleet. In this paper, we formulate the overall fleet management problem in terms of Optimal Control. We describe a scheme for solving this problem in the particular case of fleets of non-holonomic robots navigating in an environment with obstacles. The method is based on a two-phase approach, whereby the first phase solves for fleet-wide boolean decision variables via Mixed Integer Quadratic Programming, and the second phase solves for real-valued variables to obtain an optimized set of trajectories for the fleet. Examples showcasing the features of the method are illustrated, and the method is validated experimentally.
@Article{salvado-2018-fleets,
Title={Motion Planning and Goal Assignment for Robot Fleets Using Trajectory Optimization},
Author={João Salvado, Federico Pecora, Masoumeh Mansouri, Robert Krug},
Journal={2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}
}