
![]() Andrey Rudenko, Tomasz P. Kucner, Chittaranjan S. Swaminathan, Ravi T. Chadalavada, Kai O. Arras, and Achim J. Lilienthal. THÖR: Human-Robot Navigation Data Collection and Accurate Motion Trajectories Dataset. IEEE Robotics and Automation Letters
Andrey Rudenko, Tomasz P. Kucner, Chittaranjan S. Swaminathan, Ravi T. Chadalavada, Kai O. Arras, and Achim J. Lilienthal. THÖR: Human-Robot Navigation Data Collection and Accurate Motion Trajectories Dataset. IEEE Robotics and Automation Letters
Abstract
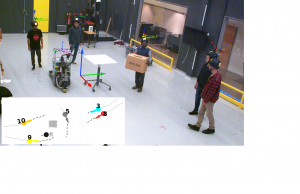
Understanding human behavior is key for robots and intelligent systems that share a space with people. Accordingly, research that enables such systems to perceive, track, learn and predict human behavior as well as to plan and interact with humans has received increasing attention over the last years. The availability of large human motion datasets that contain relevant levels of difficulty is fundamental to this research. Existing datasets are often limited in terms of information content, annotation quality or variability of human behavior. In this paper, we present THÖR, a new dataset with human motion trajectory and eye gaze data collected in an indoor environment with accurate ground truth for position, head orientation, gaze direction, social grouping, obstacles map and goal coordinates. THÖR also contains sensor data collected by a 3D lidar and involves a mobile robot navigating the space. We propose a set of metrics to quantitatively analyze motion trajectory datasets such as the average tracking duration, ground truth noise, curvature and speed variation of the trajectories. In comparison to prior art, our dataset has a larger variety in human motion behavior, is less noisy, and contains annotations at higher frequencies.