
![]() Andrey Rudenko, Luigi Palmieri, Johannes Doellinger, Achim J. Lilienthal, and Kai O. Arras, Kai O. Learning Occupancy Priors of Human Motion From Semantic Maps of Urban Environments. IEEE Robotics and Automation Letters, 6(2):3248-3255.
Andrey Rudenko, Luigi Palmieri, Johannes Doellinger, Achim J. Lilienthal, and Kai O. Arras, Kai O. Learning Occupancy Priors of Human Motion From Semantic Maps of Urban Environments. IEEE Robotics and Automation Letters, 6(2):3248-3255.
Abstract
Like humans or animals, robots with compliant joints are capable of performing explosive or cyclic motions by making systematic use of energy storage and release, and it has been shown that they can outperform their rigid counterparts in terms of peak velocity. For rigid joint robots, there exist well-established, computationally inexpensive tools to compute the maximum achievable Cartesian endpoint velocity, which is an important performance and safety characteristic for robot designs. For elastic joint robots, optimal control is usually employed to determine the maximum possible link velocity together with the associated trajectory, which is time consuming and computationally costly for most systems. In this letter, we propose methods to obtain estimates of the maximum achievable Cartesian endpoint velocities of gravity-free elastic joint robots that have computational requirements close to the rigid joint robot case. We formulate an optimal control problem to verify the methods and provide results for a planar 3R robot. Furthermore, we compare the results of our approach with those from real-world throwing experiments which were previously conducted on the elastic DLR David system. Finally, we apply the methods to derive and quantitatively compare the safety properties of DLR David and a hypothetically rigid version of this robot in terms of the Safety Map framework proposed in our previous work.
@ARTICLE{rudenkoRAL2021,
author={Rudenko, Andrey and Palmieri, Luigi and Doellinger, Johannes and Lilienthal, Achim J. and Arras, Kai O.},
journal={IEEE Robotics and Automation Letters},
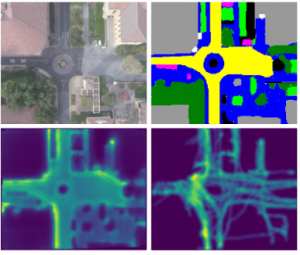
title={Learning Occupancy Priors of Human Motion From Semantic Maps of Urban Environments},
year={2021},
volume={6},
number={2},
pages={3248-3255},
doi={10.1109/LRA.2021.3062010}}