
2021
Robotic exploration for learning human motion patterns
Sergio Molina Mellado, Grzegorz Cielniak, and Tom Duckett. IEEE Transactions on Robotics.
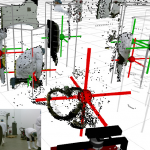
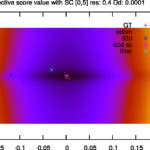
CorAl – Are the point clouds Correctly Aligned?
Daniel Adolfsson, Martin Magnusson, Qianfang Liao, Achim J. Lilienthal, and Henrik Andreasson. Proceedings of the European Conference on Mobile Robots (ECMR).
Towards Safer Robot Motion: Using a Qualitative Motion Model to Classify Human-Robot Spatial Interaction
Laurence Roberts-Elliott, Manuel Fernandez-Carmona, and Marc Hanheide. TAROS 2020
A Network-Flow Reduction for the Multi-Robot Goal Allocation and Motion Planning Problem
João Salvado, Masoumeh Mansouri, and Federico Pecora.
IEEE International Conference on Automation Science and Engineering (CASE). 2021
Combining Multi-Robot Motion Planning and Goal Allocation using Roadmaps
João Salvado, Masoumeh Mansouri, and Federico Pecora. IEEE International Conference on Robotics and Automation (ICRA)
Online Task Assignment and Coordination in Multi-Robot Fleets
Paolo Forte, Anna Mannucci, Henrik Andreasson, and Federico Pecora. IEEE Robotics and Automation Letters.

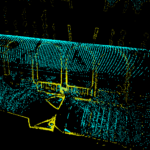
CFEAR Radarodometry - Conservative Filtering for Efficientand Accurate Radar Odometry
Daniel Adolfsson, Martin Magnusson, Anas W. Alhashimi, Achim J. Lilienthal, and Henrik Andreasson. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems.

Robust Frequency-Based Structure Extraction
Tomasz Piotr Kucner, Matteo Luperto, Stephanie Lowry, Martin Magnusson, and Achim J. Lilienthal. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). June 2021.
Calibrating range measurements of lidars using fixed landmarks in unknown positions
Anas Alhashimi, Martin Magnusson, Steffi Knorn, and Damiano Varagnolo. MDPI Sensors.
Towards a Reference Framework for Tactile Robot Performance and Safety Benchmarking
Robin Jeanne Kirschner, Kübra Karacan, Philipp Junge, Seyed Ali Baradaran Bir-jandi, Nico Mansfeld, Saeed Abdolshah, and Sami Haddadin. Proceedings of the International Conference on Intelligent Robots and Systems (IROS).
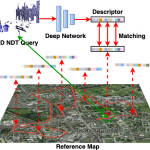
NDT-Transformer: Large-Scale 3D Point Cloud Localisation using the Normal Distribution Transform Representation
Zhicheng Zhou, Cheng Zhao, Daniel Adolfsson, Songzhi Su, Yang Gao, Tom Duckett, Li Sun. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2021.
Guest Editorial: Introduction to the Special Issue on Long-Term Human Motion Prediction
Luigi Palmieri, Andrey Rudenko, Jim Mainprice, Marc Hanheide, Alexandre Alahi, Achim Lilienthal, and Kai O. Arras. IEEE Robotics and Automation Letters.
Bench-MR: A Motion Planning Benchmark for Wheeled Mobile Robots
Eric Heiden, Luigi Palmieri, Leonard Bruns, Leonard, Kai O. Arras, Gaurav S. Sukhatme, and Sven Koenig. IEEE Robotics and Automation Letters.
Learning Occupancy Priors of Human Motion From Semantic Maps of Urban Environments
Andrey Rudenko, Luigi Palmieri, Johannes Doellinger, Achim J. Lilienthal, and Kai O. Arras, Kai O. IEEE Robotics and Automation Letters.
On Null Space Based Inverse Kinematics Techniques for Fleet Management: Towards Time-Varying Task Activation
Anna Mannucci, Danilo Caporale, and Lucia Pallottino. IEEE Transactions on Robotics.

Circular Fields and Predictive Multi-Agents for Online Global Trajectory Planning.
Nico Mansfeld , Manuel Keppler, and Sami Haddadin. IEEE Robotics and Automation Letters
On Provably Safe and Live Multirobot Coordination With Online Goal Posting
Anna Mannucci, Lucia Pallottino, and Federico Pecora. IEEE Transactions on Robotics.
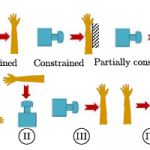
Experimental Injury Biomechanics of Human Body Upper Extremities: Anatomy, Injury Severity Classification, and Impact Testing Setups.
Mazin Hamad, Alexander Kurdas, Saeed Abdolshah, and Sami Haddadin. 2021 IEEE International Conference on Intelligence and Safety for Robotics (ISR)
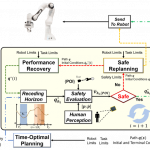
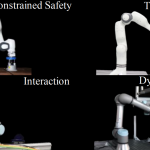
Fast and Safe Trajectory Planning: Solving the Cobot Performance/Safety Trade-Off in Human-Robot Shared Environments
Alessandro Palleschi, Mazin Hamad, Saeed Abdolshah, Manolo Garabini, Sami Haddadin, and Lucia Pallottino. IEEE Robotics & Automation Letters.
Involuntary Motion in Human-Robot Interaction: Effect of Interactive User Training on the Occurrence of Human Startle-Surprise Motion
Robin Jeanne Kirschner, Lisa Burr, Melanie Porzenheim, Henning Mayer, Saeed Abdolshah and Sami Haddadin. 2021 IEEE International Conference on Intelligence and Safety for Robotics.
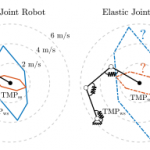
Speed Gain in Elastic Joint Robots: An Energy Conversion-Based Approach.
Nico Mansfeld , Manuel Keppler, and Sami Haddadin. IEEE Robotics and Automation Letters.
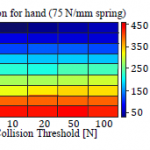
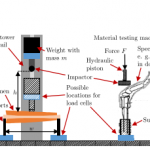
Experimental Analysis of Impact Forces in Constrained Collisions According to ISO/TS 15066
Robin Jeanne Kirschner, Nico Mansfeld, Saeed Abdolshah and Sami Haddadin. 2021 IEEE International Conference on Intelligence and Safety for Robotics.
A Robotics Perspective on Experimental Injury Biomechanics of Human Body Upper Extremities.
Mazin Hamad, Alexander Kurdas, Saeed Abdolshah, Sami Haddadin. IEEE International Conference on Intelligence and Safety for Robotics (ISR)
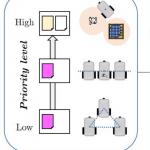
Priority-Based Distributed Coordination for Heterogeneous Multi-Robot Systems with Realistic Assumptions
Michele Cecchi, Matteo Paiano, Anna Mannucci, Alessandro Palleschi, Federico Pecora, and Lucia Pallottino. 2021. IEEE Robotics and Automation Letters.
Notion on the Correct Use of the Robot Effective Mass in the Safety Context and Comments on ISO/TS 15066
Robin Jeanne Kirschner, Nico Mansfeld, Guillermo Gomez Pe´na, Saeed Abdolshah and Sami Haddadin. 2021 IEEE International Conference on Intelligence and Safety for Robotics.
CSM : Contact Sensitivity Maps for Benchmarking Robot Collision Handling Systems
Robin Jeanne Kirschner, Nico Mansfeld, Saeed Abdolshah and Sami Haddadin. Proceedings of the 2021 IEEE International Conference on Robotics and Automation.
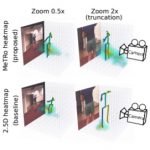
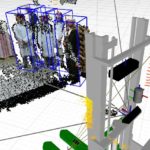
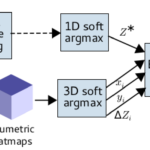
MeTRAbs: Metric-Scale Truncation-Robust Heatmaps for Absolute 3D Human Pose Estimation
István Sárándi, Timm Linder, Kai O. Arras, and Bastian Leibe. IEEE Transactions on Biometrics, Behavior, and Identity Science.
2020
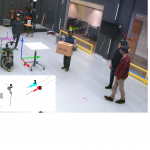
THÖR: Human-Robot Navigation Data Collection and Accurate Motion Trajectories Dataset
Andrey Rudenko, Tomasz P. Kucner, Chittaranjan S. Swaminathan, Ravi T. Chadalavada, Kai O. Arras, Achim J. Lilienthal. IEEE Robotics and Automation Letters.
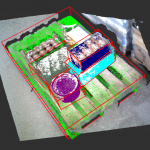
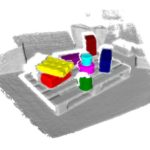
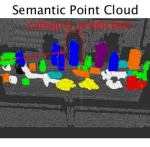
Panoptic 3D Mapping and Object Pose Estimation Using Adaptively Weighted Semantic Information
Dinh-Cuong Hoang, Achim J. Lilienthal, and Todor Stoyanov. IEEE Robotics and Automation Letters.

Flexible Automated Depalletizing: an Unwrapping Robot to Remove Plastic from Palletized Goods
Chiara Gabellieri, Alessandro Palleschi, Manuel G Catalano, Manolo Garabini, and Lucia Pallottino. Proceedings of the 2nd Italian Conference on Robotics and Intelligent Machines, 2020.
Fully Autonomous Picking with a Dual-Arm Platform for Intralogistics
Alessandro Palleschi, Marco Gugliotta, Chiara Gabellieri, Dinh-Cuong Hoang, Todor Stoyanov, Manolo Garabini, and Lucia Pallottino. Proceedings of the 2nd Italian Conference on Robotics and Intelligent Machines, 2020.
Toward Distributed solutions for heterogeneous fleet coordination
Alessandro Palleschi, Anna Mannucci, Danilo Caporale, Federico Pecora, and Lucia Pallottino. Proceedings of the 2nd Italian Conference on Robotics and Intelligent Machines, 2020.
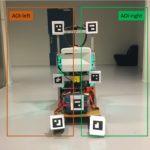
Bi-directional navigation intent communication using spatial augmented reality and eye-tracking glasses for improved safety in human–robot interaction
Ravi Teja Chadalavada, Henrik Andreasson, Maike Schindler, Rainer Palm and Achim J. Lilienthal. Proceedings of the Robotics and Computer Integrated Manufacturing Conference (RCIM) 2018.
CIAO⋆: MPC-based Safe Motion Planning in Predictable Dynamic Environments
Tobias Schoels, Per Rutquist, Luigi Palmieri, Andrea Zanelli, Kai O. Arras, and Moritz Diehl. Proceedings of the IFAC World Congress 2020.
Grasp It Like a Pro: Grasp of Unknown Objects With Robotic Hands Based on Skilled Human Expertise
Chiara Gabellieri, Franco Angelini, Visar Arapi, Alessandro Palleschi, Manuel G. Catalano, Giorgio Grioli, Lucia Pallotino, Antonio Bicchi, Matteo Bianchi, and Manolo Garabini. IEEE Robotics and Automation Letters.
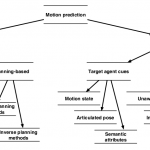
Human Motion Trajectory Prediction: A Survey
Andrey Rudenko and Luigi Palmieri and Michael Herman and Kris M Kitani and Dariu M Gavrila and Kai O Arras. The International Journal of Robotics Research.
LiDAR-Based GNSS Denied Localization for Autonomous Racing Cars
Federico Massa, Luca Bonamini, Alessandro Settimi, Lucia Pallottino, and Danilo Caporale. Sensors.
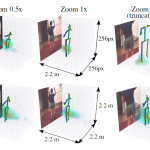
Metric-Scale Truncation-Robust Heatmaps for 3D Human Pose Estimation
István Sárándi, Timm Linder, Kai O. Arras and Bastian Leibe. Proceedings: 2020 IEEE International Conference on Automatic Face and Gesture Recognition (FG).
Natural Criteria for Comparison of Pedestrian Flow Forecasting Models
Tomáš Vintr, Zhi Yan, Kerem Eyisoy, Filip Kubiš, Jan Blaha, Jiří Ulrich, Chittaranjan S. Swaminathan, Sergi Molina, Tomasz P. Kucner, Martin Magnusson, Gregorz Cielniak, Jan Faigl, Tom Duckett, Achim J. Lilienthal, Tomáš Krajník. International Confere...

Time-Optimal Trajectory Planning for Flexible Joint Robots
Alessandro Palleschi, Riccardo Mengacci, Franco Angelini, Danilo Caporale, Lucia Pallottino, Alessandro De Luca, and Manolo Garabini. IEEE Robotics and Automation Letters.

WRAPP-Up: A Dual-Arm Robot for Intralogistics
Manolo Garabini, Danilo Caporale, Vinicio Tincani, Alessandro Palleschi, Chiara Gabellieri, Marco Gugliotta, Alessandro Settimi, Manuel G. Catalano, Giorgio Grioli, Lucia Pallottino. IEEE Robotics & Automation Magazine.
An NMPC Approach using Convex Inner Approximations for Online Motion Planning with Guaranteed Collision Avoidance
Tobias Schoels, Luigi Palmieri, Kai O. Arras, and Moritz Diehl. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2020.
Accurate detection and 3D localization of humans using a novel YOLO-based RGB-D fusion approach and synthetic training data
Timm Linder, Kilian Y. Pfeiffer, Narunas Vaskevicius, Robert Schirmer, and Kai O. Arras. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2020.
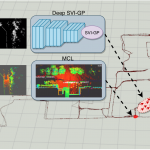
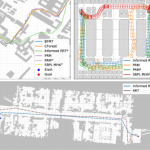
Localising Faster: Efficient and precise lidar-based robot localisation in large-scale environments
Li Sun, Daniel Adolfsson, Martin Magnusson, Henrik Andreasson, Ingmar Posner, and Tom Duckett. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2020.
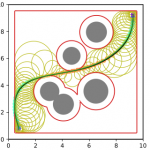
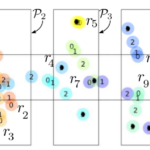
Probabilistic Mapping of Spatial Motion Patterns for Mobile Robots
Tomasz Piotr Kucner, Achim J. Lilienthal, Martin Magnusson, Luigi Palmieri, Chittaranjan Srinivas Swaminathan. Springer, Cognitive Systems Monographs (40)
Model-Adaptive High-Speed Collision Detection for Serial-Chain Robot Manipulators
Seyed Ali Baradaran Birjandi and Sami Haddadin. IEEE Robotics and Automation Letters.
Dispertio: Optimal Sampling for Safe Deterministic Motion Planning
Luigi Palmieri, Leonard Bruns, Michael Meurer, and Kai O. Arras. IEEE Robotics and Automation Letters.
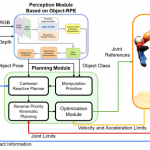
Object-RPE: Dense 3D Reconstruction and Pose Estimation with Convolutional Neural Networks for Warehouse Robots
Dinh-Cuong Hoang, Todor Stoyanov, and Achim J. Lilienthal. Robotics and Autonomous Systems.
2019
Improving the Performance of Auxiliary Null Space Tasks via Time Scaling-Based Relaxation of the Primary Task.
Nico Mansfeld, Youssef Michel, Tobias Bruckmann and Sami Haddadin. International Conference on Robotics and Automation (ICRA).

Multi-Robot Planning Under Uncertain Travel Times and Safety Constraints
Masoumeh Mansouri, Bruno Lacerda, Nick Hawes, and Federico Pecora. IJCAI 2019.
Making the Case for Human-aware Navigation in Warehouses
Manuel Fernandez-Carmona, Tejas Parekh, and Marc Hanheide. TAROS 2019.

Time-Optimal Path Tracking for Jerk Controlled Robots
Alessandro Palleschi, Manolo Garabini, Danilo Caporale, and Lucia Pallottino. IEEE Robotics and Automation Letters.

Semantically Assisted Loop Closure in SLAM Using NDT Histograms
Anestis Zaganidis, Alexandros Zerntev, Tom Duckett, and Grzegorz Cielniak. IROS 2019.

Dynamic Whole-Body Control of Unstable Wheeled Humanoid Robots
Grazia Zambella, Gianluca Lentini, Manolo Garabini, Giorgio Groli, Manuel G. Catalano, Alessandro Palleschi, Lucia Pallottino, Antonio Bicchi, Alessandro Settimi, and Danilo Caporale. RA-L.
Provably Safe Multi-Robot Coordination With Unreliable Communication
Anna Mannucci, Lucia Pallottino, and Federico Pecora. RA-L.

Collision Preventing Phase-Progress Control for Velocity Adaptation in Human-Robot Collaboration
Dinmukhamed Zardykhan, Petr Svarny, Erfan Shahriari and Sami Haddadin. Humanoids 2019.
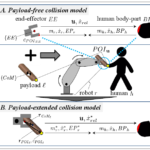
The Role of Robot Payload in the Safety Map Framework
Mazin Hamad, Nico Mansfeld, Saeed Abdolshah and Sami Haddadin. IROS 2019.

A Submap per Perspective - Selecting Subsets for SuPer Mapping that Afford Superior Localization Quality
Daniel Adolfsson, Stephanie Lowry, Martin Magnusson, Achim J. Lilienthal and Henrik Andreasson. ECMR 2019.
Unified Motion-Based Calibration of Mobile Multi-Sensor Platforms With Time Delay Estimation
Bartolomeo Della Corte, Henrik Andreasson, Todor Stoyanov, and Giorgio Grisetti. IEEE Robotics and Automation Letters.
Time-varying Pedestrian Flow Models for Service Robots
Tomás Vintr, Sergi Molina, Ransalu Senanayake, George Broughton, Zhi Yan, Jirı Ulrich,
Tomasz Piotr Kucner, Chittaranjan Srinivas Swaminathan, Filip Majer, Mária Stachová,
Achim J. Lilienthal, and Tomás Krajník. Proceedings of the European Conference on Mo...
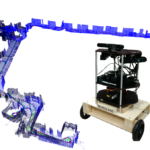
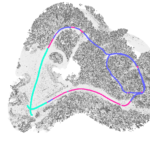
Go with the Flow: Exploration and Mapping of Pedestrian Flow Patterns from Partial Observations
Sergi Molina, Grzegorz Cielniak and Tom Duckett. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2019.

Towards Training Person Detectors for Mobile Robots using Synthetically Generated RGB-D Data
Timm Linder, Michael Johan Hernandez Leon, Narunas Vaskevicius, and Kai Oliver Arras. CVPR 2019: Workshop on 3D Scene Generation.
A Novel Weakly-supervised approach for RGB-D-based Nuclear Waste Object Detection and Categorization
Li Sun, Cheng Zhao, Zhi Yan, Pengcheng Liu, Tom Duckett, and Rustam Stolkin. IEEE Sensors Journal.
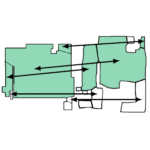
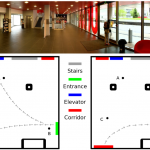
URSIM: Unique Regions for Sketch map Interpretation and Matching
Malcolm Mielle, Martin Magnusson, and Achim J. Lilienthal. Robotics.
Informed Information Theoretic Model Predictive Control
Raphael Kusumoto, Luigi Palmieri, Markus Spies, Akos Csiszar, and Kai. O. Arras. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2019.
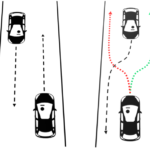
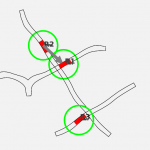
Deconfliction of Motion Paths with Traffic Inspired Rules in Robot–Robot and Human–Robot Interactions
Federico Celi, Li Wang, Lucia Pallottino, and Magnus Egerstedt. IEEE Robotics and Automation Letters. [Awards finalist: Best Paper Award on Human-Robot Interaction at ICRA 2019]

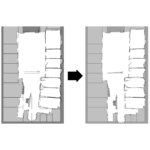
The Auto-Complete Graph: Merging and Mutual Correction of Sensor and Prior Maps for SLAM
Malcolm Mielle, Martin Magnusson, and Achim J. Lilienthal. Robotics.
2018
Accessing your navigation plans! Human Robot Intention Transfer using Eye Tracking Glasses
Ravi Teja Chadalavada, Henrik Andreasson, Maike Schindler, Rainer Palm, and Achim J. Lilienthal. Proceedings of the 16th International Conference on Manufacturing Research (ICMR) 2018.
Motion Planning and Goal Assignment for Robot Fleets Using Trajectory Optimization
João Salvado, Federico Pecora, Masoumeh Mansouri, and Robert Krug. 2018 IEEE International Conference on Intelligent Robots and Systems (IROS).
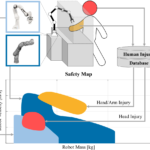
Safety Map: A Tool for Global Robot Safety Evaluation and Safe Robot Design
Nico Mansfeld, Mazin Hamad, Marvin Becker, Antonio Gonzales Marin, and Sami Haddadin. 2018 IEEE International Conference on Robotics and Automation (ICRA).

Learning monocular visual odometry with dense 3D mapping from dense 3D flow
Cheng Zhao, Li Sun, Pulak Purkait, Tom Duckett, and Rustam Stolkin. Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS) 2018.
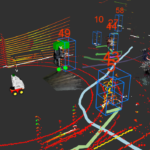
Multisensor Online Transfer Learning for 3D LiDAR-based Human Detection with a Mobile Robot
Zhi Yan, Li Sun, Tom Duckett, and Nicola Bellotto. Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS) 2018.
Dense RGB-D Semantic Mapping with Pixel-Voxel Neural Network
Cheng Zhao, Li Sun, Pulak Purkait , Tom Duckett, and Rustam Stolkin. Sensors.

Recurrent-OctoMap: Learning State-based Map Refinement for Long-Term Semantic Mapping with 3D-Lidar Data
Li Sun, Zhi Yan, Anestis Zaganidis, Cheng Zhao, and Tom Duckett. IEEE Robotics and Automation Letters.
Integrating Deep Semantic Segmentation Into 3-D Point Cloud Registration
Anestis Zaganidis, Li Sun, Tom Duckett, and Grzegorz Cielniak. IEEE Robotics and Automation Letters.

Introduction to the Special Issue on AI for Long-Term Autonomy
Lars Kunze, Nick Hawes, Tom Duckett, and Marc Hanheide. IEEE Robotics and Automation Letters.

Artificial Intelligence for Long-Term Robot Autonomy: A Survey
Lars Kunze, Nick Hawes, Tom Duckett, Marc Hanheide, and Tomás Krajník. IEEE Robotics and Automation Letters.
Modelling and Predicting Rhythmic Flow Patterns in Dynamic Environments
Sergi Molina, Grzegorz Cielniak, Tomás Krajník, and Tom Duckett. 2018 Conference Towards Autonomous Robotic Systems (TAROS).
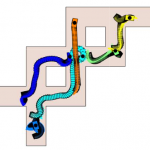
Down The CLiFF: Flow-aware Trajectory Planning under Motion Pattern Uncertainty
Chittaranjan Srinivas Swaminathan, Tomasz Piotr Kucner, Martin Magnusson, Luigi Palmieri, and Achim J. Lilienthal. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
Improving Localisation Accuracy using Submaps in Warehouses
Daniel Adolfsson, Stephanie Lowry, and Henrik Andreasson. IROS 2018: Workshop on Robotics for Logistics in Warehouses and Environments Shared with Humans.
Towards Accurate 3D Person Detection and Localization from RGB-D in Cluttered Environments
Timm Linder, Dennis Griesser, Narunas Vaskevicius, and Kai O. Arras. IROS 2018: Workshop on Robotics for Logistics in Warehouses and Environments Shared with Humans.
Synthetic Occlusion Augmentation with Volumetric Heatmaps for the 2018 ECCV PoseTrack Challenge on 3D Human Pose Estimation
István Sárándi, Timm Linder, Kai O. Arras, and Bastian Leibe. European Conference on Computer Vision (ECCV) 2018 Workshops. [Winner of 2018 PoseTrack 3D Challenge]

Human Motion Prediction Under Social Grouping Constraints
Andrey Rudenko, Luigi Palmieri, Achim J. Lilienthal, and Kai O. Arras. Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS) 2018.
[Awards finalist: Best Paper Award on Safety Security and Rescue Robotics]

How Robust is 3D Human Pose Estimation to Occlusion?
István Sárándi, Timm Linder, Kai O. Arras, and Bastian Leibe. IROS 2018: Workshop on Robotic Co-workers 4.0: Human Safety and Comfort in Human-Robot Interactive Social Environments.
Deep Person Detection in Two-Dimensional Range Data
Lucas Beyer, Alexander Hermans, Timm Linder, Kai O. Arras, and Bastian Leibe.
IEEE Robotics and Automation Letters (RA-L) with presentation at IROS, 2018.
Nonlinear Optimization of Multimodal 2D Map Alignment with Application to Prior Knowledge Transfer
Saeed Gholami Shahbandi, Martin Magnusson, and Karl Iagnemma.
IEEE Robotics and Automation Letters.

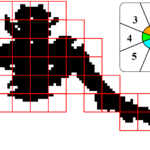
2D Map Alignment with Region Decomposition
Saeed Gholami Shahbandi and Martin Magnusson.
Autonomous Robots.
Safety Map: A Unified Representation for Biomechanics Impact Data and Robot Instantaneous Dynamic Properties
Nico Mansfeld , Mazin Hamad , Marvin Becker, Antonio Gonzales Marin, and Sami Haddadin. IEEE Robotics and Automation Letters.
A Survey of Voxel Interpolation Methods and an Evaluation of Their Impact on Volumetric Map-Based Visual Odometry
Daniel Ricão Canelhas, Todor Stoyanov, and Achim J. Lilienthal. IEEE International Conference on Robotics and Automation (ICRA) 2018.

A Loosely-Coupled Approach for Multi-Robot Coordination, Motion Planning and Control
Federico Pecora, Henrik Andreasson, Masoumeh Mansouri and Vilian Petkov.
Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS).
3DOF Pedestrian Trajectory Prediction Learned from Long-Term Autonomous Mobile Robot Deployment Data
Li Sun, Zhi Yan, Sergi Molina Mellado, Marc Hanheide, and Tom Duckett. IEEE International Conference on Robotics and Automation (ICRA) 2018.

Joint Long-Term Prediction of Human Motion Using a Planning-Based Social Force Approach
Andrey Rudenko, Luigi Palmieri, and Kai Oliver Arras.
IEEE International Conference on Robotics and Automation (ICRA) 2018.
Gradient-Informed Path Smoothing for Wheeled Mobile Robots
Eric Heiden, Luigi Palmieri, Sven Koenig, Kai Oliver Arras, and Gaurav Sukhatme.
IEEE International Conference on Robotics and Automation (ICRA) 2018.
2017
FreMEn: Frequency Map Enhancement for Long-Term Mobile Robot Autonomy in Changing Environments
Tomas Krajnik, Jaime P. Fentanes, Joao M. Santos, and Tom Duckett. IEEE Transactions on Robotics

Spatiotemporal Models for Motion Planning in Human Populated Environments
Tomas Vintr, Sergi Mellado Molina, Grzegorz Cielniak, Tom Duckett and Tomas Krajnik. 2017 Student Conference on Planning in Artificial Intelligence and Robotics (PAIR).

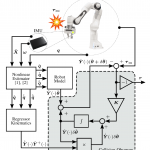
Improving the Performance of Biomechanically Safe Velocity Control for Redundant Robots through Reflected Mass Minimization
Nico Mansfeld, Badis Djellab, Jaime Raldúa Veuthey, Fabian Beck, Christian Ott, and Sami Haddadin. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2017.

Modelling and Predicting Rhythmic Flow Patterns in Dynamic Environments
Sergi Molina, Grzegorz Cielniak, Tomáš Krajník, and Tom Duckett.
Proceedings of the UK-RAS Network Conference.

Navigation Testing for Continuous Integration in Robotics
Jaime Pulido Fentanes, Christian Dondrup, and Marc Hanheide.
UK-RAS Conference on Robotics and Autonomous Systems (RAS 2017).
Learning to Detect Misaligned Point Clouds
Håkan Almqvist, Martin Magnusson, Tomasz Piotr Kucner, and Achim J. Lilienthal.
Journal of Field Robotics (Volume: 35, Issue: 5).
Semantic-Assisted 3D Normal Distributions Transform for Scan Registration in Environments with Limited Structure
Anestis Zaganidis, Martin Magnusson, Tom Duckett, and Grzegorz Cielniak.
Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS) 2017.
Incorporating Ego-motion Uncertainty Estimates in Range Data Registration
Henrik Andreasson, Daniel Adolfsson, Todor Stoyanov, Martin Magnusson, and Achim J. Lilienthal.
Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS) 2017.
Semi-Supervised 3D Place Categorisation by Descriptor Clustering
Martin Magnusson, Tomasz Piotr Kucner, Saeed Gholami Shahbandi, Henrik Andreasson, and Achim J. Lilienthal.
Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS) 2017.
Hybrid Curvature Steer: A Novel Extend Function for Sampling-Based Nonholonomic Motion Planning in Tight Environments
Holger Banzhaf, Luigi Palmieri, Dennis Nienhüser, Thomas Schamm, Steffen Knoop, and J. Marius Zöllner.
IEEE ITSC 2017, IEEE 20th International Conference on Intelligent Transportation Systems.
Grasp Quality Evaluation Done Right: How Assumed Contact Force Bounds Affect Wrench-Based Quality Metrics
Robert Krug, Yasemin Bekirogluz, and Máximo A. Roa.
IEEE International Conference on Robotics and Automation (ICRA), 2017.
Predictive Planning for a Mobile Robot in Human Environments
Andrey Rudenko, Luigi Palmieri, and Kai O. Arras.
Workshop on AI Planning and Robotics: Challenges and Methods (ICRA), 2017.
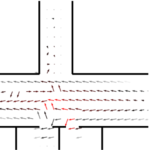
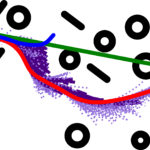
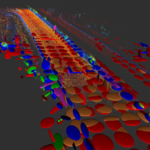
Enabling Flow Awareness for Mobile Robots in Partially Observable Environments
Tomasz Piotr Kucner, Martin Magnusson, Erik Schaffernicht, Victor Hernandez Bennetts, and Achim J. Lilienthal.
IEEE Robotics and Automation Letters.

Noninteracting Constrained Motion Planning and Control for Robot Manipulators
Manuel Bonilla, Lucia Pallottino, and Antonio Bicchi.
IEEE International Conference on Robotics and Automation (ICRA), 2017.
Kinodynamic Motion Planning on Gaussian Mixture Fields
Luigi Palmieri, Tomasz Kucner, Martin Magnusson, Achim J. Lilienthal, and Kai O. Arras.
IEEE International Conference on Robotics and Automation (ICRA), 2017.